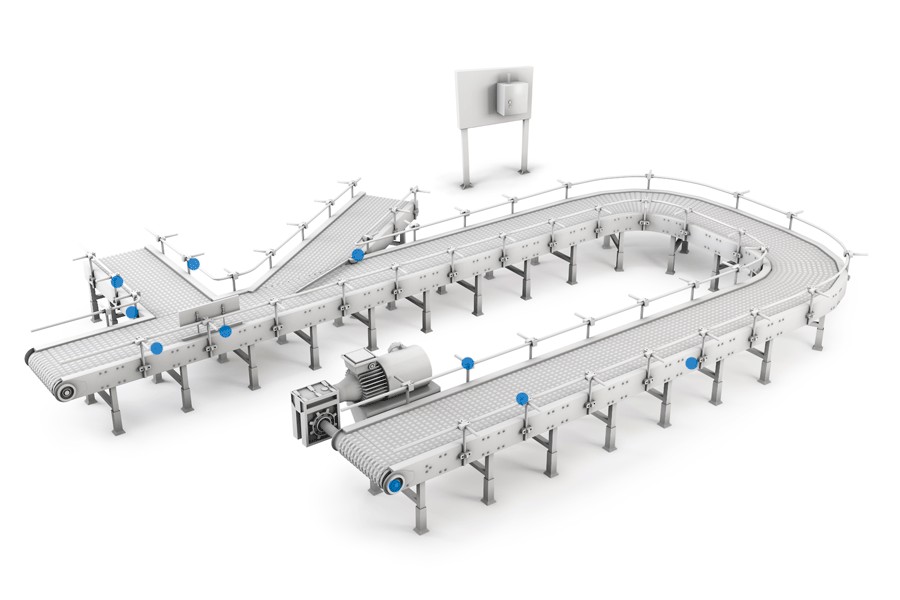
Определение перемещения деталей оборудования и транспортных систем в пищевом производстве
Если вы видите только часть изображения - потяните изображение влево




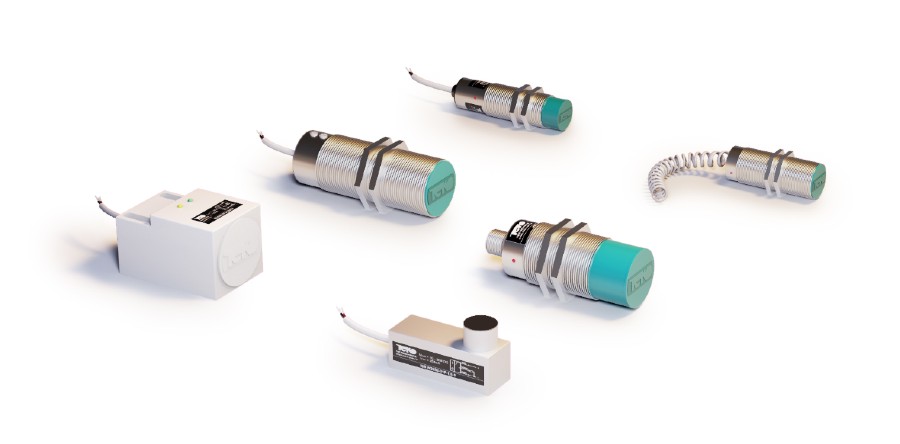
При необходимости определить не только присутствие объекта в зоне чувствительности датчика, но и определить вектор его движения, скорость, расстояние до него, характер поверхности, применяются индуктивные преобразователи перемещения серий ISAB (встраиваемые) и ISAN (невстраиваемые), в корпусе из нержавеющей стали. Использование датчиков с аналоговой схемой в выходном каскаде, индуктивных преобразователей перемещения (ИПП) решает перечисленные задачи.
Постоянно снимаемый с чувствительной поверхности сигнал несет информацию о пространственно-временных изменениях, происходящих с контролируемым объектом. После прохождения через детектор и усилитель из сигнала можно выделить информационную составляющую и подать ее на специальное устройство или прибор для наглядного отображения.
При выборе аналогового датчика учитывают такие важные технические характеристики как рабочий зазор, линейная зона рабочего зазора и линейность. Рабочий зазор показывает минимальное и максимальное расстояние от объекта воздействия до чувствительной поверхности датчика. Для разных видов аналоговых датчиков он может составлять от 0,8 мм до 30 мм при ширине чувствительной зоны от 4,2 мм до 25 мм. В ее границах существует участок, где зависимость величины выходного сигнала (Iвых или Uвых) от расстояния контролируемого объекта до чувствительной поверхности датчика пропорциональна. Его называют линейной зоной рабочего зазора.
«Качество» линейной зоны, то есть степень отклонения ее от прямой, учитывается показателем «линейность». Он составляет 3-5 %, чем ниже значение, тем точнее зависимость.
Сфера применения индуктивных преобразователей перемещения достаточно обширна, например в системах позиционирования средней степени точности, для сортировки, измерения толщины, при определении неровности поверхности, в устройствах автоматического поддержания натяжения проводов, тросов и лент. При одновременном использовании двух аналоговых датчиков можно строить эффективные системы позиционирования и центровки.
Индуктивные преобразователи перемещений